[python] Re: 65 degree pivot angle
- From: Vi Vuong <vi_vuong@xxxxxxxxx>
- To: python@xxxxxxxxxxxxx
- Date: Thu, 17 Mar 2011 23:03:04 -0700 (PDT)
Hi Kurt,
Yes, you are the winner so far by a hair in pivot / seat rise. There must be a
parameter / metric that correlates with ride-ability, and probably has to do
with gravity...
Here is another relatively long wheelbase python for a kid
http://www.youtube.com/watch?v=pVNthQhZj_A
and here is just another cute one
http://www.youtube.com/watch?v=I4PESbeLiw0
I would say don't worry about the vehicle weight, it's good for exercise /
leisure. I would take a heavy one over a broken one any day. My heaviest is
over 100lbs. My ultimate target is the pedalbus or pedalpub; got the wheels so
far...
Vi
________________________________
From: Kurt Rutter <tokabago@xxxxxxxxx>
To: python@xxxxxxxxxxxxx
Sent: Thu, March 17, 2011 7:55:26 PM
Subject: [python] Re: 65 degree pivot angle
Hey Vi,
Yes I agree the rod end pivots might be ideal for prototyping, which is
generally as far I get (day job: nurse) but they do look heavy. I finally
weighed my python, 18.5 kg! Ouch sort of a cow. Maybe there exists some high
grade aluminum aircraft version of rod end that would fix the weight issue, or
maybe I am mentally overdesigning them.
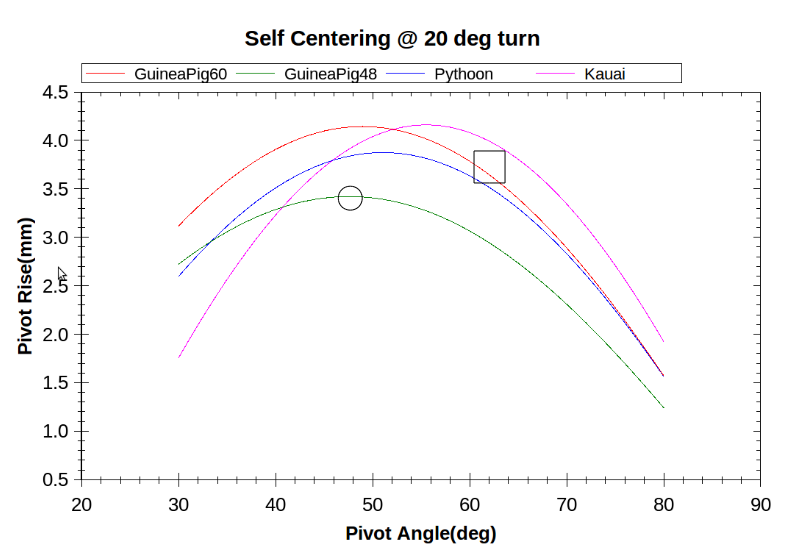
Thanks for the plots, is that me shifted off the the right? I win! Did I win?
What did I win? [American ;=)]. I admire the Pythoon very much after seeing the
video. Interesting that Pythoon's pivot angle is 62.5 compared to 65 for Kauai,
but has a much longer wheelbase. I moved to greater pivot angle and shorter
wheelbase and improved control (now it's rideable) but Pythoon is obviously
very
rideable too. Jurgen mentions the effect of front end weight relative to center
weight ( I guess actually mass). Pythoon has a pretty nice front end structure
that looks light, while my front end is the heavier part of my bike unloaded,
so
that may account for the performance. Also Pythoon used ballast in the middle
part for the video (child / copilot) increasing the mass of the middle relative
to the front. Alas, my children are grown.
Kurt
On Wed, Mar 16, 2011 at 4:50 PM, Vi Vuong <vi_vuong@xxxxxxxxx> wrote:
Hi Kurt
>
>
>I plotted your new measurements, along with mine and the Pythoon. Here is the
>link in case you are interested.
>http://en.openbike.org/images/openbike/2/28/GuineaPigPivotAngle.png
>It seems that pivot angle is more sensitive than wheelbase. It would be nice
>to
>be able to adjust both. Rod end pivot is supposedly good for fine
>adjustment, http://en.openbike.org/wiki/Steering_Pivot
>
>
>Vi
>
>
>
________________________________
From: Kurt Rutter <tokabago@xxxxxxxxx>
>To: python@xxxxxxxxxxxxx
>Sent: Wed, March 16, 2011 12:03:43 AM
>Subject: [python] 65 degree pivot angle
>
>
>I too shortened my pyhon (by 7 inches to a 111cm or so wheelbase) and
>increased
>the pivot angle by a couple of degrees to 65 degrees. The ride improved quite
>a
>bit. I was surprised how how much improvement came from a slight change in
>pivot
>angle, even though Jurgen has stressed this more than once :=) The bike will
>now
>maybe fit on the county bus bike rack (for slightly lazy commuting). I'm using
>a
>rigid mountainbike fork, extra long for suspension compensation. If I switch
>to
>a regular road fork I will lose another 3-4 inches in length but will have to
>raise the seat about 6 inches so the backrest will clear the rear wheel.
>Compromises!
>Kurt
>
>(\_/)
>(0.o)
>(___)o
>
--
Kurt Rutter, RN, MSN
Kauai Community College
Nursing Department
krutte@xxxxxxxxxx
cell: 631-9131
(\_/)
(0.o)
(___)o
Other related posts:
{kind=link}